Gradiente, matriz jacobiana, funciones diferenciables
Contents
Gradiente, matriz jacobiana, funciones diferenciables#
import time
print(' Última ejecución ', time.asctime() )
Última ejecución Sat Mar 18 10:55:36 2023
Objectivos#
Presentar los conceptos de
gradiente y matriz jacobiana
definición de función diferenciable
Discutir sobre:
La condición suficiente de diferenciabilidad
las bondades de las funciones diferenciables
# general imports
# general imports
%matplotlib inline
%reload_ext autoreload
%autoreload 2
# numpy and matplotlib
import numpy as np
import matplotlib
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
matplotlib.style.use('ggplot')
import graph_utils as gf
figsize = 6, 3.8
cmap = 'hot'
Gradiente#
Para una función escalar \(f(x, y)\) diferenciable, hemos dado el desarrollo de Taylor en un punto \((x_0, y_0)\) si nos desplazamos en el espacio origen un vector \((v _x, v_y)\).
o lo que es lo mismo:
Donde la expresión:
Es el producto escalar entre \((v_x, v_y)\), el vector desplazamiento; y otro vector, el gradiente, \(\nabla f (x_0, y_0)\), cuyas componentes son las derivadas parciales:
Supongo que ya has visto el gradiente en Física. En el electromagnetismo definimos el campo eléctrico como (menos) el gradiente del potencial.
Puedes revisar que efectivamente es así, a partir de la definición de potencial y campo eléctrico que vimos en la sección sobre funciones escalares y vectoriales.
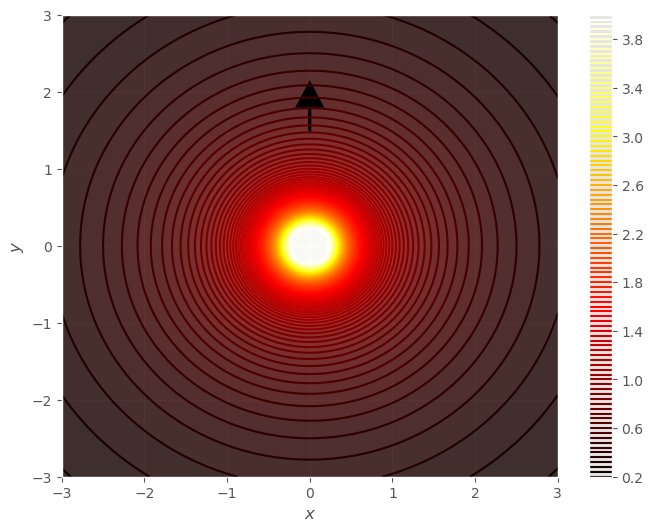
Ejemplo: La siguiente figura nos muestra los conjuntos de nivel del potencial eléctrico de una carga. También nos muestra el campo eléctrico, (el gradiente cambiado de signo), en un determinado punto \((x_0, y_0)\)
Explora y cambia el punto y observa como cambia el gradiente.
x0, y0 = 0., 1.5
V = lambda x, y : 1/(x*x + y*y)**(1/2)
Ex = lambda x, y : x/(x*x + y*y)**(3/2)
Ey = lambda x, y : y/(x*x + y*y)**(3/2)
gf.contour(V, contours = 100, zlim=(0., 4));
gf.arrow(x0, y0, Ex(x0, y0), Ey(x0, y0));
Por supuesto, lo que hemos visto para funciones escalares de dos dimensiones para para cualquier dimensión.
Sea una función \(f({\bf x})\) escalar definida en \(\mathrm{R}^n\), diremos que es «suave», si tiene desarrollo de Taylor de primer orden, esto es, la función en un punto \({\bf x}\) próximo a \({\bf x}_0\), relacionados por un vector «pequeño», \({\bf v}\) por \({\bf x} = {\bf x}_0 + {\bf v}\), se puede aproximar por un hyper-plano.
donde las derivadas parciales son las pendientes en cada dirección, \(f'_i ({\bf x}_0)\).
Ejercicio: Calcula el gradiente de las siguientes funciones:
\(f(x, y) = e^{x + y}\)
\(f(x, y) = \cos x \sin y\)
Solución:
\(\nabla f(x, y) = \left( e^{x+y}, \; e^{x+y} \right)\)
\(\nabla f(x, y) = \left( -\sin x \sin y, \; \cos x \cos y \right)\)
El gradiente nos aporta más información sobre la función. Fíjate:
El término:
es un producto escalar que podemos reescribir cómo:
donde \(\theta\) es el ángulo que forman los dos vectores.
Tenemos ahora dos casos:
los dos vectores son paralelos, si van en la misma dirección y sentido, es máximo.
Esto es, si el desplazamiento \( {\bf v} \) va en la misma dirección y sentido que el gradiente, el cambio de la función es máximo.
los dos vectores son perpendiculares, el término es nulo.
O lo que es lo mismo, la valor función no cambiará ortogonalmente al gradiente.
Regresemos a la relación entre el campo y el potencial eléctrico:
El gradiente entonces indica la dirección y sentido en el que el potencial eléctrico decae más rápidamente.
Ahora recordemos los conjuntos de nivel, que son aquellos puntos del espacio inicial cuya valor de la función es \(c\).
El gradiente va a ser normal a los conjuntos de nivel, porque en los conjuntos de nivel el valor de la función no cambia.
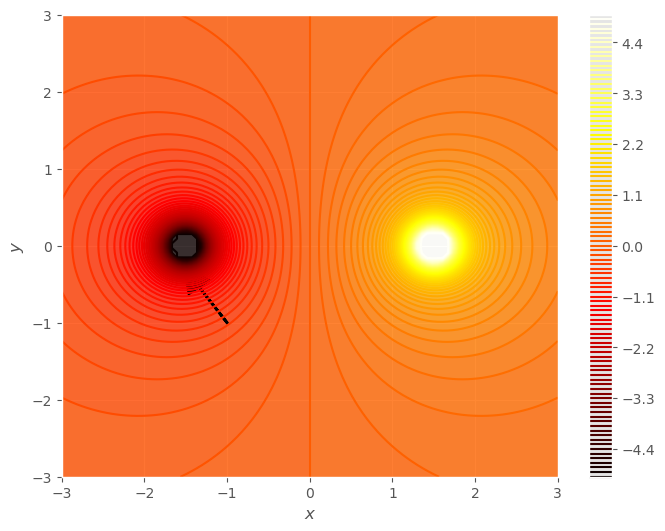
Ejemplo: La siguiente figura nos muestra los conjuntos de nivel de un dipolo eléctrico. También nos muestra el campo eléctrico, (el gradiente cambiado de signo), en un determinado punto \((x_0, y_0)\)
Explora y cambia el punto y observa como cambia el gradiente.
from common_functions import edipole
x0, y0 = -1, -1.
V, Ex, Ey = edipole(1., 1.5, 0., -1.5, 0.)
gf.contour(V, contours= 100, zlim=(-5., 5.))
gf.arrow(x0, y0, Ex(x0, y0), Ey(x0, y0));
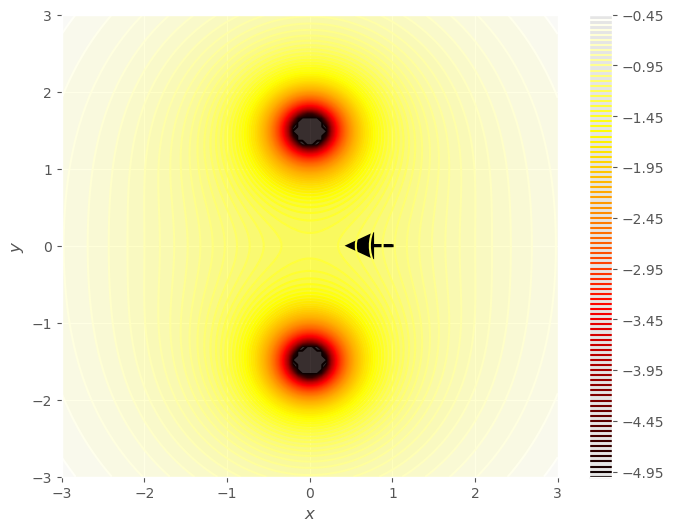
La siguiente celda te permite dibujar el potencial de un conjunto de cargas. El dibujo corresponde a dos cargas negativas situadas en el eje vertical separadas por 2 unidades.
Explora y cambia el punto y observa como cambia el potencial y el gradiente.
Explora y cambia el sistema de cargas para ver como cambia el potencial y el gradiente en un punto.
from common_functions import esystem
x0, y0 = 1.0, 0.0
charges = [(-1., 0, 1.5), (-1., 0, -1.5)]
V, Ex, Ey = esystem(charges)
gf.contour(V, contours = 100, zlim=(-5., 5.))
gf.arrow(x0, y0, Ex(x0, y0), Ey(x0, y0));
Matriz Jacobiana#
Una función vectorial es diferenciable, si y solo si, lo son cada una de sus funciones componentes.
Sea una función vectorial, \({\bf f}({\bf x})\) de \(\mathrm{R}^n \to \mathrm{R}^m\), que es diferenciable en un punto \({\bf x}_0\)
cada uno de sus funciones componentes debe ser diferenciable, pongamoslas una debajo de la otra:
O también:
Que podemos reescribir de forma matricial, colocando \({\bf v}\), \({\bf f}({\bf x}_0 + {\bf v})\) y \({\bf f}({\bf x}_0)\) como vectores columnas.
Donde \({\bf Df}({\bf x}_0)\) es una matriz cuyos elementos son:
Cuestión: Si te fijas en las filas de la matriz jacobiana, ¿a qué corresponden?
Ejercicio: Calcula la matriz jacobiana de la siguiente función vectorial:
Solución:
\({\bf Df}(x, y) = \left( \begin{array}{cc} e^{x+y} & e^{x+y} \\ -\sin x \sin y & \cos x \cos y \end{array} \right)\)
Recapitulemos:
Si una función escalar, \(f({\bf x})\) es diferenciable podemos aproximarla en un punto \({\bf x}_0\) y en una dirección \({\bf v}\) por :
donde \(\nabla f {\bf x}_0\) es el gradiente:
Si una función vectorial, \({\bf f}({\bf x})\) es diferenciable podemos aproximarla en un punto \({\bf x}_0\) y en una dirección \({\bf v}\) por:
donde \({\bf Df}({\bf x}_0)\) es la matriz jacobiana:
Cuestión: Ya conoces con seguridad de Física al menos una matriz jacobiana. ¿Sabes cuál?
¡La velocidad!
Si tenemos una trayectoria de un móvil en el espacio en función del tiempo:
En la noticación anterior, la matriz jacobiana es:
El desarrollo de Taylor es por lo tanto:
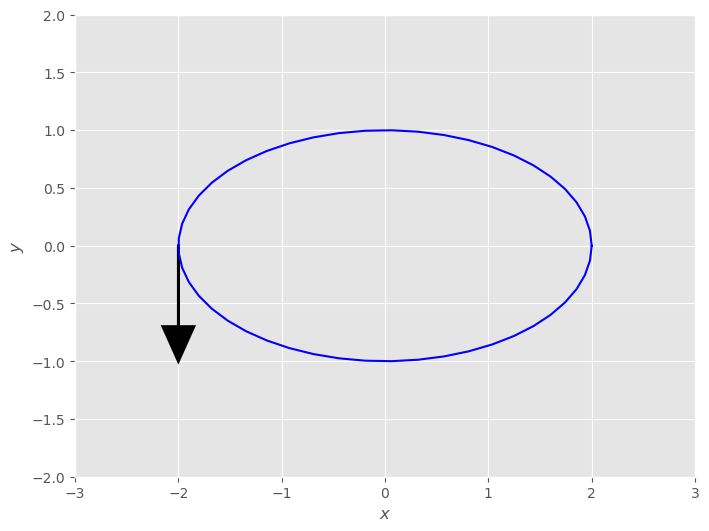
Ejemplo: La siguiente celda dibuja la línea de un movil a lo largo de una elipse y en un punto su velocidad (su «matriz» jacobiana)
Explora: puedes cambiar el valor de \(t_0\) y observa como cambia la velocidad.
t0 = 4*np.pi/4.
a, b, w = 2, 1, 1
fx = lambda t: a*np.cos(w*t)
fy = lambda t: b*np.sin(w*t)
fxp = lambda t: -w*a*np.sin(w*t)
fyp = lambda t: w*b*np.cos(w*t)
gf.line2d(fx, fy, (0, 2*np.pi));
gf.arrow(fx(t0), fy(t0), fxp(t0), fyp(t0));
plt.xlim(-a-1, a+1); plt.ylim(-b-1, b+1);
Función diferenciable#
Hemos visto como son las funciones diferenciables, pero ¿cómo las definimos matemáticamente? ¿cuándo una función será diferenciable?
Sea \({\bf f}: D \subset \mathbf{R}^n \to \mathbf{R}^m\), decimos que la función es diferenciable en un punto \({\bf x}\) interior a \(D\) si en una bola centrada en \({\bf x}\) de radio \(r\) y para los vectores que cumplen \(\| {\bf v} \| < r\), existe una transformación lineal \({\bf T_x}: \mathbf{R}^n \to \mathbf{R}^m\) y una función error, \({\bf E}:\mathbf{R}^n \to \mathbf{R}^m\), \({\bf E}({\bf x},{\bf v})\), tales que:
donde \({\bf E}({\bf x}, {\bf v })\) es una función error de orden \(\mathcal{O}(\| {\bf v} \|)\), que cumple:
Esto es:
A \({\bf T_x}\) se llama diferencial o derivada de \({\bf f}\) en \({\bf x}\).
La expresión anterior es el desarrollo de Taylor de primer orden de \({\bf f}({\bf x}+{\bf v})\)
\({\bf T_x}\) es la derivada de \({\bf f}\) en \({\bf x}\).
Si se trata de una función escalar, \(f({\bf x})\), es un gradiente, \(\nabla f({\bf x})\).
Si se trata de una función vectorial, \({\bf f}({\bf x})\), es la matriz jacobiana, \({\bf Df}({\bf x})\)
Y te adelanto que:
\({\bf T_x}({\bf v})\) es la derivada direccional de \({\bf f}({\bf x})\) en el punto \({\bf x}\) y la dirección \({\bf v}\)
Si se trata de un función escalar, \({\bf T_x}({\bf v}) = \nabla f({\bf x}) {\bf v}\).
Si se trata de una función vectorial, \({\bf T_x}({\bf v}) = {\bf Df}({\bf x}) {\bf v}\)
Propiedades de las funciones diferenciables
Ejercicios: Intenta ahora demostrar los siguientes teoremas:
Teorema
Si una función \({\bf f}({\bf x})\) de \(\mathrm{R}^n \to \mathrm{R}^m\) es diferenciable en un punto interior \({\bf x}\), entonces en continua en ese punto.
Teorema
Si una función \({\bf f}({\bf x})\) de \(\mathrm{R}^n \to \mathrm{R}^m\) es diferenciable en un punto interior \({\bf x}\), su derivada direccional a lo largo de un vector \({\bf v}\) viene dada por:
si la función es escalar
si la función es vectorial
Teorema: Sean \({\bf f,g}\) dos funciones vectoriales definidas en \(S\subset \mathbf{R}^n \to\mathbf{R}^m\); \(f, g\) dos campos escalares definidos en \(S'\subset \mathbf{R}^n \to \mathbf{R}\) y \(\lambda\) un número real. Si son diferenciables en un punto \({\bf x}\), la siguientes funciones también lo son, con la siguiente derivada:
Condición suficiente de diferenciabilidad#
Si recuerdas un función real de una dimensión, \(f(x)\), era diferenciable, tenía desarrollo de Taylor, en un punto interior, \(x\), si su derivada, \(f'(x)\), era continua en un intervalo centrado en ese punto \(x\).
Ahora para funciones escalares, se cumple:
Teorema:
Una función \(f({\bf x})\) definida en un dominio \(D \subset \mathrm{R}^n \to \mathrm{R}\) es diferenciable si sus derivadas parciales, \(f'_{x_i}({\bf x})\), son continuas en una bola en torno a \({\bf x}\).
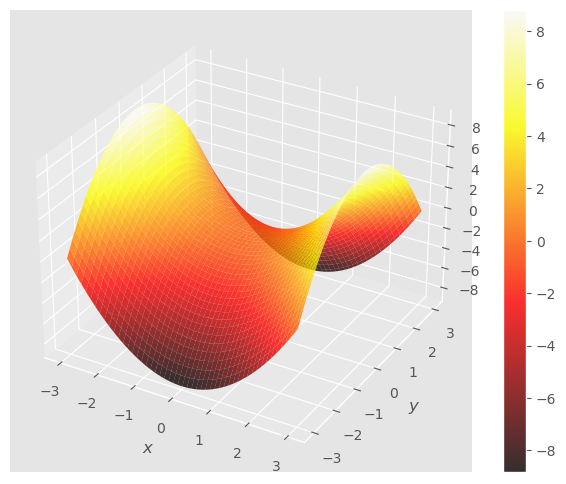
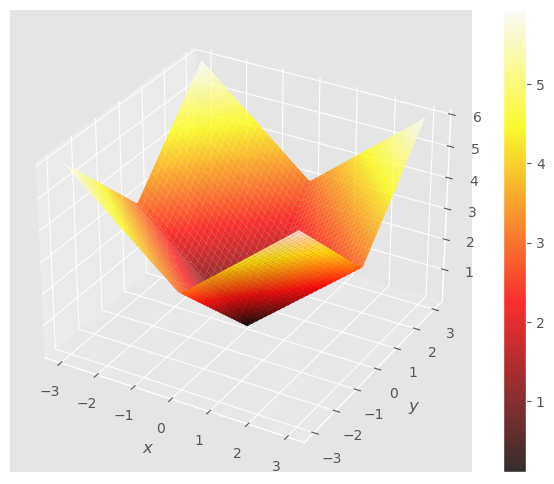
Cuestión: En la siguiente celda están dibujadas dos funciones escalares, \(f(x, y)\) de \(\mathrm{R}^2 \to \mathrm{R}\), una de ellas es diferenciable en todo el dominio y la otra no. ¿Sabes cual es la diferenciable?
fun1 = lambda x, y : x*x - y*y
gf.graph(fun1);
fun2 = lambda x, y : np.abs(x) + np.abs(y)
gf.graph(fun2);
¡Esto es todo por ahora!
Apendices#
Demostración de la condición suficiente de diferenciabilidad
Lo demostraremos solamente en funciones escalares.
Queremos comprobar que
y que
Sea el vector \({\bf v}\) con norma \(\lambda\) y vector unitario \({\bf u}\). Construimos \(n+1\) vectores \({\bf v}_i\), que van incorporando sucesivamente cada coordenada de \({\bf v}\), empezando por \({\bf v}_0 = {\bf 0}\).
Consideramos, por comodidad, los vectores:
Reescribimos la parte izquierda de la igualdad con una suma telescópica:
Cada sumando, por ejemplo: \(f({\bf b}_{k-1} + \lambda u_k {\bf e}_k)-f({\bf b}_{k-1})\), es una función de una dimensión, en la coordenada \(k\). Podemos aplicar por lo tanto el teorema del valor medio en un punto \({\bf c}_k\) entre \({\bf b}_{k-1} + \lambda u_k {\bf e}_k\) y \({\bf b}_{k-1}\) y siendo la anchura del intervalo \(\lambda u_k\):
Introducimos un sumando nulo por conveniencia, \(\sum_{k=1}^n \lambda u_k \, [f'_k({\bf x}) -f'_k({\bf x})]\), con el fin de obtener el término \(\nabla f({\bf x}) \, {\bf v}\):
Si recuperamos la expresión de función diferenciable:
Cuando \({\bf v} \to 0, \; \lambda \to 0\), entonces \(\forall k, \: {\bf c}_k \to {\bf x}\).
Si las derivadas parciales, \(f'_k({\bf x})\), son continuas entoces \({\bf x}\), \(E({\bf x},{\bf v}) \to 0\). Luego la función es diferenciable. Q.E.D